[VIP第1年] 指数:3
[VIP第1年] 指数:3
船用雷达物位计的发展呈现出以下几个方面的趋势:
技术改进方面:更高的测量精度:随着电子技术和信号处理技术的不断进步,船用雷达物位计的测量精度在逐步提高。例如,采用更先进的信号处理算法、更高频率的雷达波以及更灵敏的接收装置等,能够更准确地测量物位信息,满足船舶对货物液位、舱底水位等精确测量的需求。更强的抗干扰能力:船舶上存在多种电磁干扰源,如通信设备、发动机等。未来的船用雷达物位计会通过优化滤波电路设计、采用抗干扰材料以及改进天线设计等方式,进一步提高抗干扰能力,确保在复杂的船舶环境中稳定工作。多参数测量与融合:除了物位测量,未来的雷达物位计可能会集成更多的传感器,实现对温度、压力等其他参数的同时测量,并将这些参数进行融合分析,为船舶的运营管理提供更多的信息。
功能拓展方面:智能化与自动化、适应复杂工况、无线通信功能
应用领域拓展方面:在新船型上的应用、在船舶维护与检修中的应用
市场竞争与产业发展方面:市场需求增长、产业整合与升级 无锡宏智铭科技为您提供雷达物位计,有想法的可以来电咨询!连云港船用调频雷达物位计

80G调频雷达物位计
安装注意事项安装位置选择:要考虑物料的进料口、出料口位置以及容器内的搅拌装置等因素。尽量避免安装在物料冲击较大的区域和搅拌器的正上方或正下方,防止物料飞溅或者搅拌器对微波信号的干扰。例如在有搅拌桨的反应釜中,比较好将雷达物位计安装在搅拌桨叶旋转半径之外的位置。天线方向调整:确保天线垂直于被测物料表面,这样可以获得很强的反射信号。在安装过程中,可以使用水平仪和角度仪等工具来调整天线的安装角度。同时,要注意天线周围不能有遮挡物,避免影响微波信号的发射和接收。考虑容器形状和材质:对于不同形状(如圆柱形、球形等)和材质(如金属、塑料等)的容器,微波信号的反射特性会有所不同。在安装时要根据容器的具体情况进行适当调整。例如在金属容器中,微波信号的反射效果较好,但可能会产生多次反射,需要合理选择安装位置和调整信号处理参数来避免多次反射对测量结果的干扰。 苏州RD80G03雷达物位计无锡宏智铭科技供应雷达物位计,欢迎您的来电哦!

雷达物位计和雷达液位计安装和使用注意事项差异
雷达物位计(针对固体):在安装时,需要考虑固体物料的堆积特性和进料出料方式。如果是测量颗粒状固体,要注意物料的安息角(堆积角)可能对测量的影响,安装位置应尽量避免物料在进料过程中直接冲击天线。同时,对于粉末状固体,还要考虑粉尘对天线的污染问题,可能需要安装防尘装置。例如,在测量粮食筒仓的物位时,进料口周围可能会出现物料堆积过高的情况,安装位置应避开这个区域,以防止虚假信号。
雷达液位计(针对液体):安装位置主要考虑避免液体的波动和泡沫对测量的影响。例如,在安装于化工反应釜时,如果反应釜内液体有搅拌装置,要将雷达液位计安装在搅拌引起的液面波动较小的位置,并且要考虑液体中可能产生的泡沫,因为泡沫可能会使反射波提前返回,导致液位测量值偏低,有的情况下可能需要采用特殊的导波雷达液位计来穿透泡沫进行准确测量。
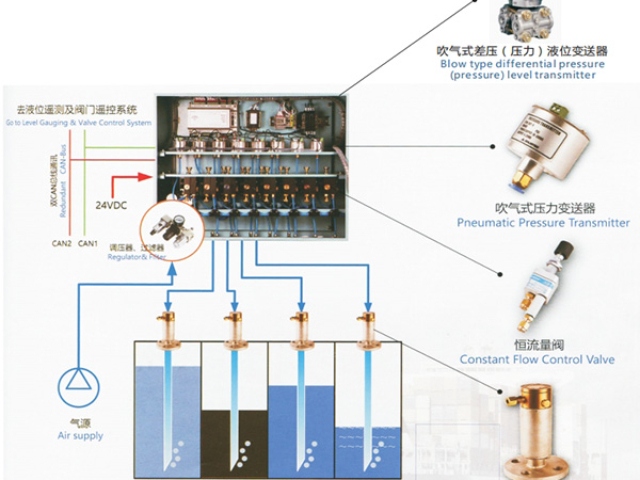
雷达物位计是一种用于测量液体或固体物料在容器内高度(即物位)的仪器,以下是详细介绍:
工作原理:
雷达物位计是通过发射电磁波,电磁波接触到物料表面后被反射回来,雷达物位计的天线系统接收反射波。根据发射波与反射波的时间差以及电磁波在介质中的传播速度,就能计算出物料表面到雷达天线的距离,进而得出物位高度。其计算公式为:L=C*T/2,其中是物位高度,是电磁波在介质中的传播速度,是发射波与反射波的时间间隔。由于电磁波在空气中的传播速度近似于光速(约3*10^8m/s),这个速度是已知的,所以只要精确测量时间差,就能准确测量物位。 船舶雷达物位计品质售后有保障,欢迎联系宏智铭科技。

雷达物位计优点:
高精度测量
雷达物位计的测量精度通常较高,可以达到毫米级。例如在一些高精度化工原料储存罐的液位测量中,能够精确控制原料的进料和出料,保证生产过程的稳定性。
非接触式测量
它不与被测物料直接接触,这对于一些腐蚀性强的液体(如强酸、强碱)或高温、高压环境下的物料测量非常有利。比如在炼油厂的高温原油储罐中,雷达物位计可以在罐外安全地进行液位测量,避免了接触式测量可能因腐蚀或高温损坏探头的问题。
适应多种物料
能够测量各种不同性质的物料,包括液体、固体颗粒、块状固体等。例如在粮食仓储中可以测量小麦、玉米等颗粒状粮食的料位,在矿山可以测量矿石堆的高度。
不受介质物理特性影响
其测量结果不受物料的密度、粘度、温度、压力等物理特性变化的影响。像在一些食品加工行业,即使物料的温度、粘度在生产过程中发生变化,雷达物位计依然可以准确测量液位。 雷达物位计品质可靠,欢迎咨询无锡宏智铭科技了解!江苏RD80G06雷达物位计
雷达物位计服务,就选无锡宏智铭科技,用户的信赖之选,有需求可以来电咨询!连云港船用调频雷达物位计
如何在软件上提高船用雷达物位计的抗干扰能力?
改进软件算法
信号滤波算法:采用数字滤波技术,如有限 impulse 响应(FIR)滤波和无限 impulse 响应(IIR)滤波。FIR 滤波可以设计成线性相位滤波器,对信号进行精确的滤波处理,去除特定频率的干扰信号。通过在雷达物位计的信号处理软件中加入这些滤波算法,可以对接收的反射信号进行实时滤波,提高信号的质量。运用自适应滤波算法。由于船舶在不同的航行状态和环境下,干扰信号的频率和强度会发生变化,自适应滤波算法能够根据实际情况自动调整滤波器的参数。
数据处理算法:采用数据融合技术。船用雷达物位计可以同时采集多个数据点,如不同时间点的物位测量值或者不同角度下的反射信号强度。通过数据融合算法,将这些数据进行综合处理。例如,使用卡尔曼滤波算法,它可以根据前一时刻的测量值和当前时刻的测量值,结合系统的状态方程和测量方程,对物位数据进行比较好估计。在船舶晃动导致液体波动的情况下,这种数据融合算法能够有效地去除波动引起的虚假信号,得到更准确的物位值。运用统计分析算法。
连云港船用调频雷达物位计
文章来源地址: http://jtys.smdnjgsb.chanpin818.com/cyyqybtj/deta_27853378.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。